






无人机低空遥感植物表型分析系统
型号: TP-KJG
基于无人机挂载可见光相机实现的低空遥感系统是一种集成无人机飞行平台、高分辨率可见光相机以及配套的数据处理软件的综合性监测解决方案。该系统利用无人机采集地面或作物的高清图像,通过图像处理技术进而分析识别作物出苗率、生育期、作物长势、株高、冠层覆盖度、倒伏、穗数及给出产量预测、种植策略优化等关键指标。适合于农业监测、巡检等场景。
产品介绍:
基于无人机挂载可见光相机实现的低空遥感系统是一种集成无人机飞行平台、高分辨率可见光相机以及配套的数据处理软件的综合性监测解决方案。
该系统利用无人机采集地面或作物的高清图像,通过图像处理技术进而分析识别作物出苗率、生育期、作物长势、株高、冠层覆盖度、倒伏、穗数及给出产量预测、种植策略优化等关键指标。适合于农业监测、巡检等场景。
功能特点:
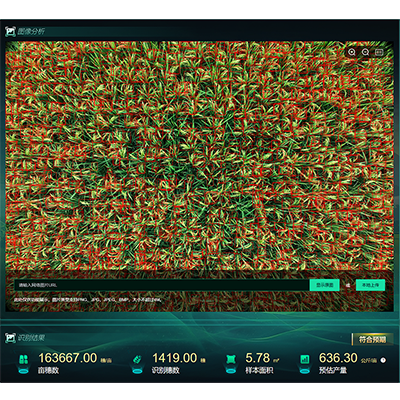
- 多品种智能监测:覆盖水稻、小麦、玉米等常见作物检测能力:从补苗指导、生育期识别、株高分析、覆盖度分析、倒伏分析以及产量预估等算法能力。
- 玉米雄穗识别:在育种制种过程中对玉米雄穗进行识别,提高去雄检测效率和精准度。
- 全自主航线规划与拍摄:支持预设飞行路径,自动完成图片采集,降低人工操作误差。
- 长续航与大范围作业:支持最大40+分钟续航与15公里飞行半径。
- 可视化管理平台:集成GIS地图显示基地与地块信息,可查看任意基地和地块信息。
- 智能地块划分管理:支持设置地块名称、类型、土壤等信息,地块面积自动计算,可标记父本行并隐藏,避免父本行雄穗对识别结果带来的影响。
- 物联设备集成管理:支持绑定气象站、土壤传感器等设备与地块联动,实现环境数据自动采集、归集。
- 多设备集成:支持考种、光合等科研设备数据接入,实现数据同步,无需手动录入。
- 高精度图像处理:采用图像拼接与空间校正技术,自动排除遮挡干扰得出实际对应的物理面积。
- 无人机领航去雄:支持通过无人机自动导航到雄穗上方,物理标记雄穗位置,方便雄穗的精准定位,快速去雄。
- 农事操作闭环管理:记录操作类型、投入品及执行人员,结合生长模型实现标准化生产管理。
- 农事操作指导:可结合生育期和作物生长模型,指导相关农事操作,标准化生产过程。
- 校正自学习功能:支持手动校正识别结果,基于校正数据,模型可自动学习。
- 多维度数据报表:支持通过时间、地块等维度,通过扇形图、柱状图、列表等形式展现地块、识别结果等数据,方便科研分析。
- 多格式数据导出:支持Excel、PNG、PDF等多种格式导出数据。


技术参数:
- 飞行器尺寸:折叠(不带桨):221 mm*3 mm*90.3 mm
- 飞行器飞行速度:最大水平飞行速度(无风):15 米/秒(普通挡)、最大抗风速度:12米/秒
- 影像传感器:广角相机:4/3 CMOS,有效像素 2000 万;长焦相机:
1/2″ CMOS,有效像素 1200 万 - 图像格式:JPEG/DNG(RAW)
- 最大飞行时间(无风):45分钟
- 最大续航里程:32 公里
- 悬停精度(无风或微风环境):
- 垂直:±0.1 米(视觉定位正常工作时);±0.5 米(GNSS 正常工作时);±0.1 米(RTK 正常工作时)
水平:±0.3 米(视觉定位正常工作时);±0.5 米(高精度定位系统正常工作时);±0.1 米(RTK 正常工作时) - 飞行器支持RTK定位模块和无人机场;
- 实时图传质量:遥控器:1080p/30fps
- 工作环境温度:-10℃至40℃


